This is a short compilation of some of the work I have been a part of in the last couple of years both in school and in the industry. Feel free to reach out if you would like to know more.
Robotics
Robotic Device Verification Test (RDVT) System
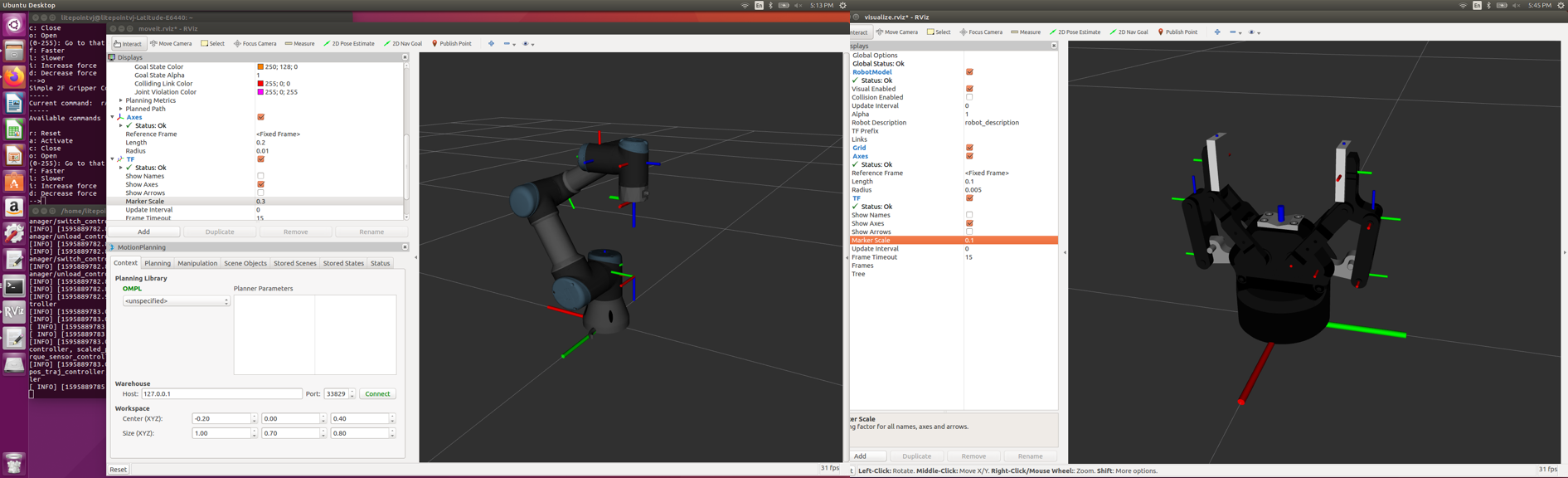
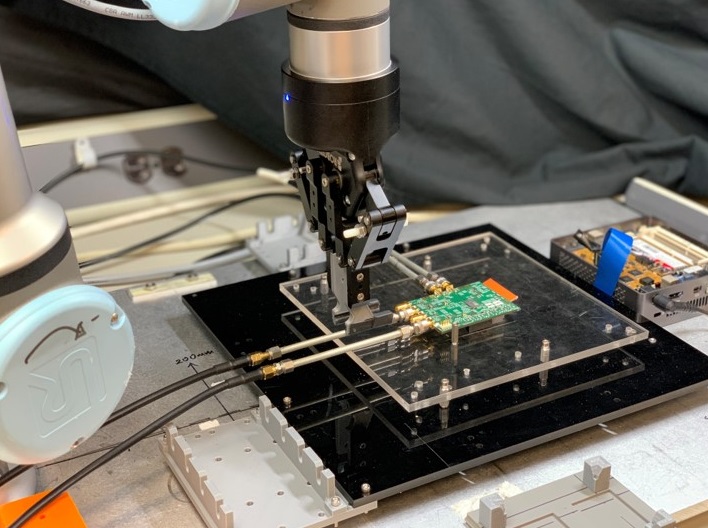
In my current position at LITEPOINT as a Robotic Applications Engineer, I am leading the development of a robotic device verification system to be used for the automated testing of RF modules. The process is a highly repetitive one with test batches sometimes consisting of up to several hundred RF modules. As this is a bench-top process requiring relatively high repeatability, I am using a Universal Robots UR3 (CB-series) 6-axis robot coupled with a Robotiq 2-finger gripper, as my base manipulator.
(Please excuse the lack of details as the work is ongoing and proprietary)
I spent Spring-Summer of 2019 with MISO Robotics: a brilliant start-up based in Pasadena CA. They are creating the world’s first autonomous robotic kitchen assistant (Flippy) that can learn from its surroundings and acquire new skills over time. Checkout Flippy here!
As part of their hardware team, I provided technical assistance for assembly, deployment and initial maintenance of Flippy.
Robotics | Bio-Inspired Design
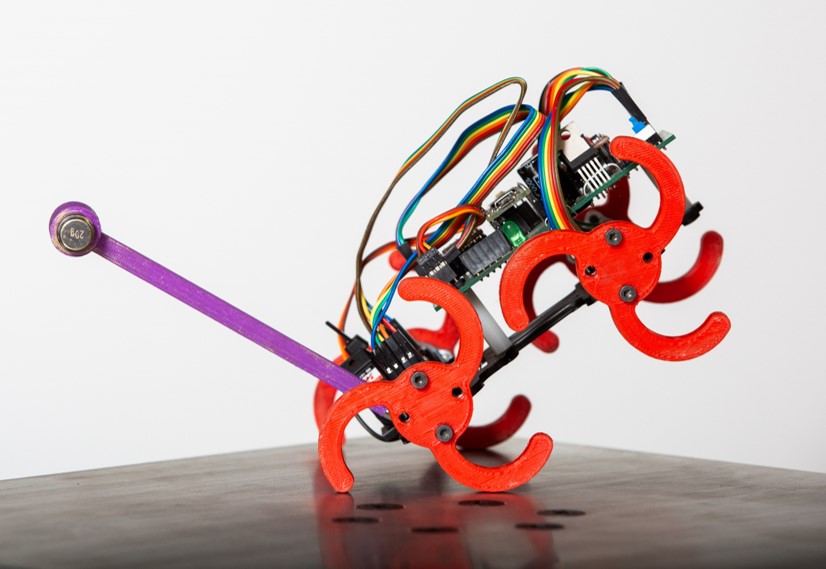
BasiliskBot: Robotic Experiments on Dry and Wet Sand
A basilisk-inspired quadrupedal robot: BasiliskBot, was developed to further study locomotion on wet granular media This was the robotic phase of a study that previously consisted of animal experiments on dry and wet granular media. After a systematic series of experiments, it was observed that the robot can also achieve higher velocities at increased saturation levels just as the Basilisk lizard. This work can pave the way for developing robotic systems which can explore complex environments for scientific discovery, planetary exploration, or search-and-rescue missions.
As one of the student leads, I was in charge of designing and fabricating the robot’s mechanical components and PCBs, as well as programing bipedal and quadrupedal gait controls.
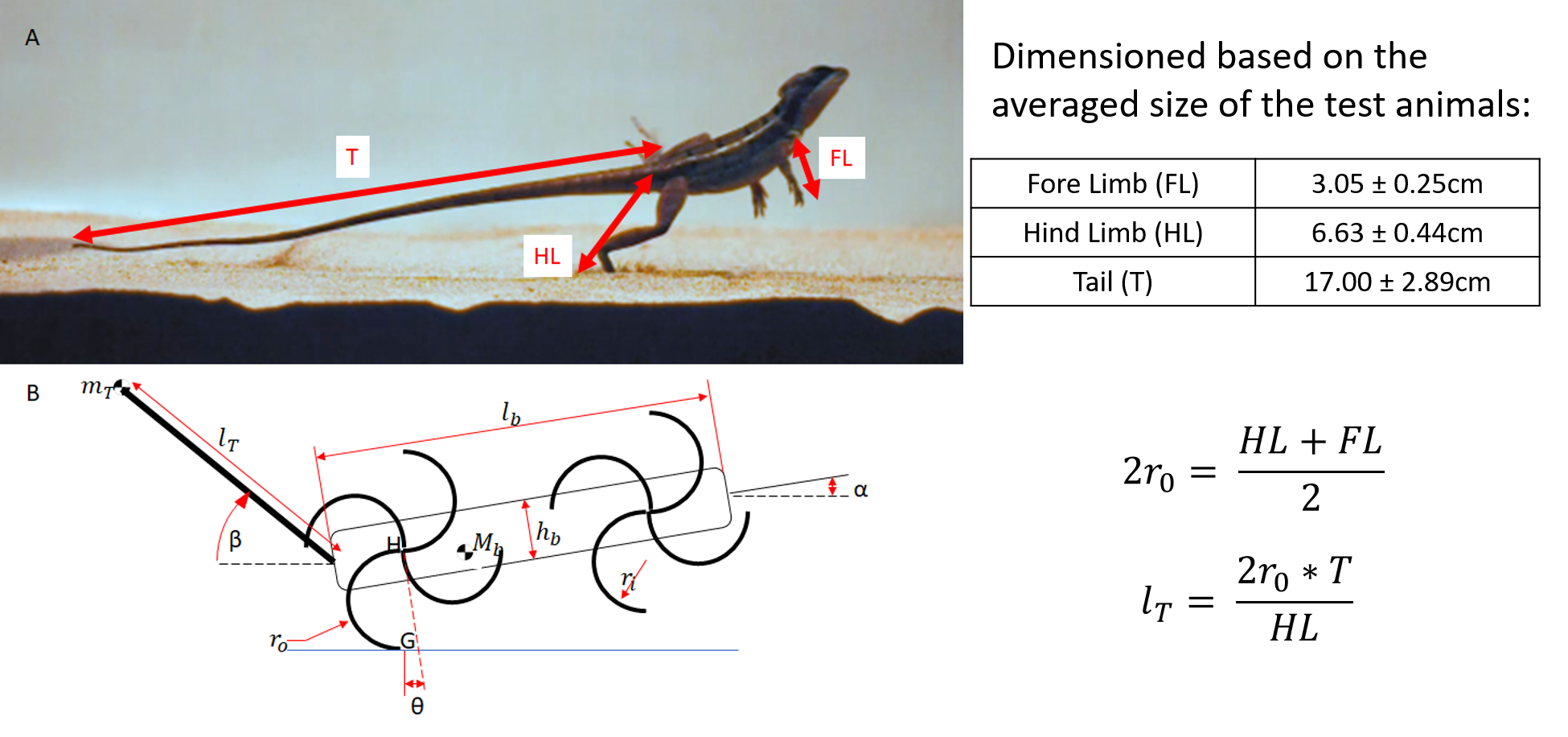
Basilisk Bot (version 2)
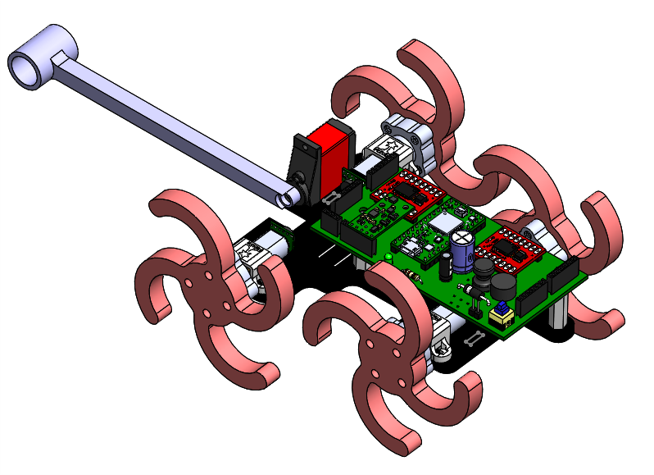
Solidworks assembly of a 4-spoked BasiliskBot
Scale is based on average dimensions of test animals used during locomotion experiments
H. Bagheri, V. Jayanetti, H. Burch, C.E. Brenner, J.K. Arnold, H. Marvi∗, “A Bio-Inspired Robot for Locomotion on Dry and Wet Granular Media,” Society for Integrative and Comparative Biology, Tampa, FL, January 2019.
Animal Bio-Mechanics
Basilisk Lizard Locomotion on Dry and Wet Sand
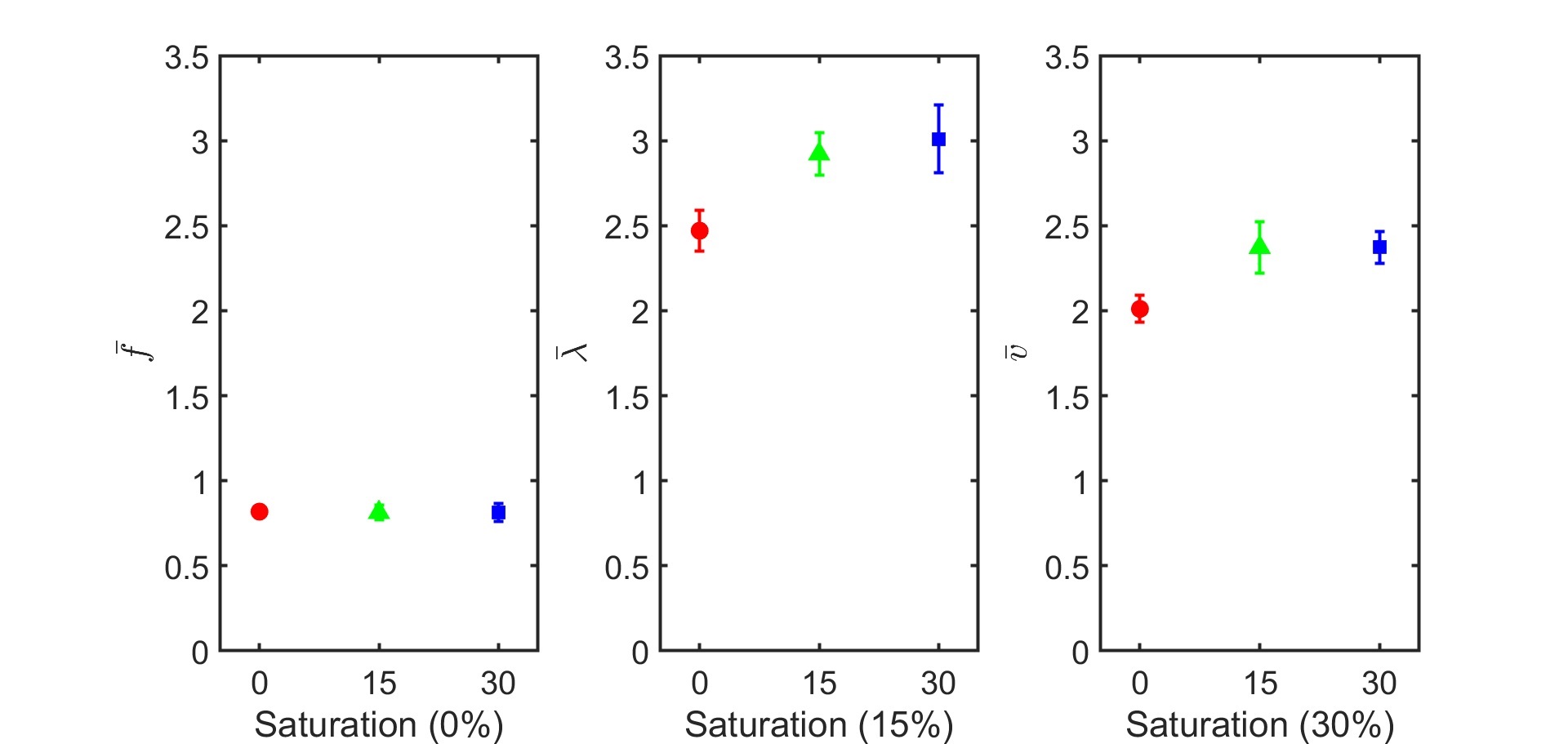
The objective was to evaluate the locomotion of animals inhabiting semi-aquatic terrains to learn more about effective locomotion strategies in such environments. The semi-aquatic terrain considered here was wet sand. The Basilisk Lizard (Basiliscus vittatus) in particular, is known for their ability to move rapidly on wet granular media. Extensive animal experiments were done to see how the Basilisk lizard varies its speed, stride length and stride frequency from dry to wet sand. The animal experiments showed that on higher saturation levels, velocity of the animal was increased due to an increase in the stride length.
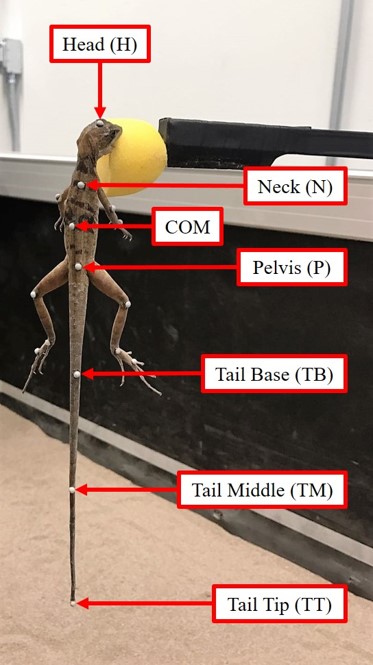
Passive IR markers attached to the body of an adult Basilisk Lizard
Animal experiments in a granular test track fitted with an Optitrack motion capturing system
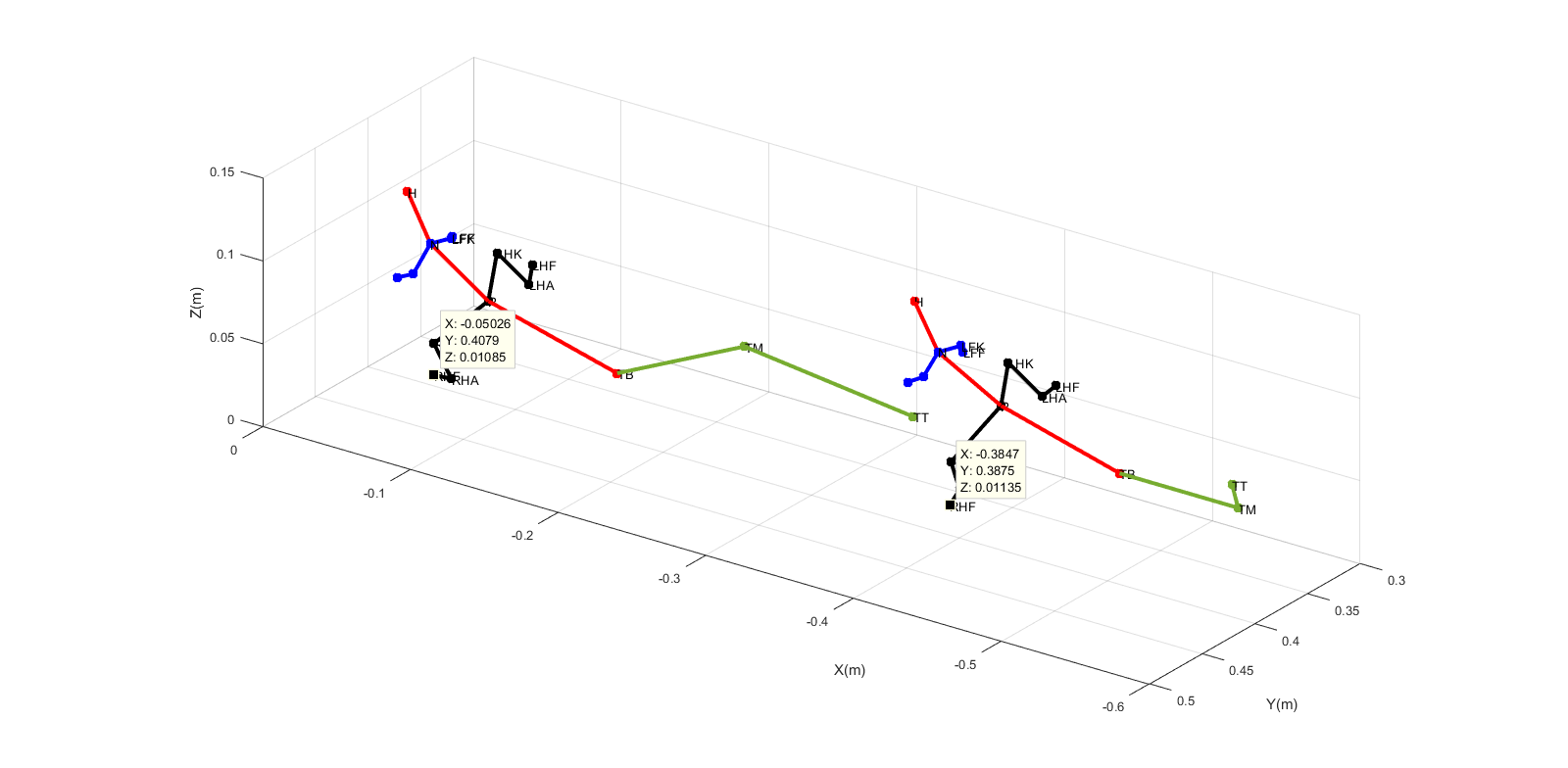
Optitrack + Matlab reconstruction of animal stick figures
(L-R) Variation of stride frequency, stride length and body velocity vs saturation
Basilisk Lizards Transition Strategies from Land to Water
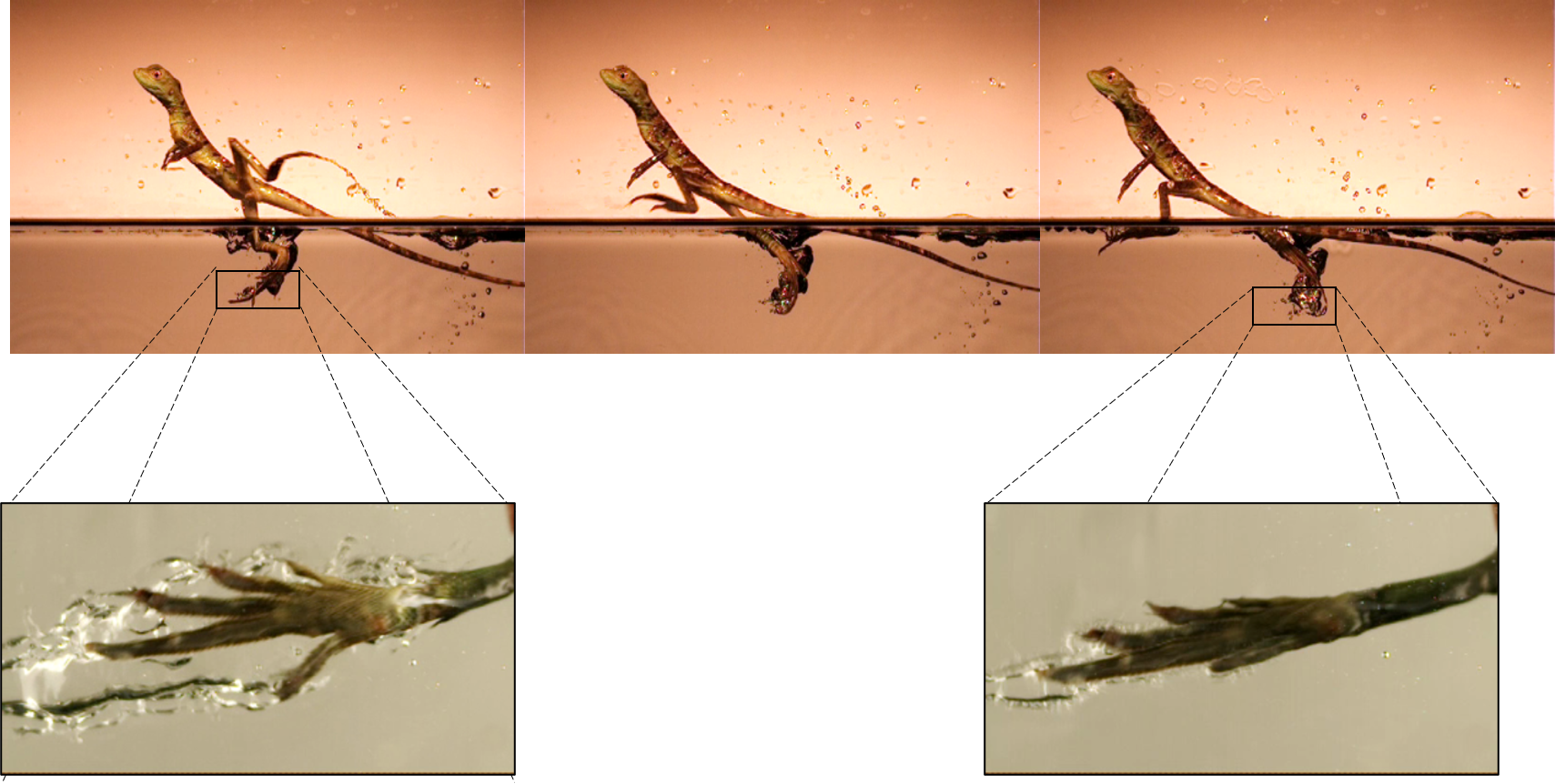
In this project, I collaborated with a team of students to study how Basilisk Lizards transitioned from land (solid medium) to water (aquatic medium). Basilisk lizards are famous for their ability to “run” on water at rapid speeds. We tested this ability in both Brown and Green Basilisk species and different sizes.
Objectives were to:
Identify different types of amphibious locomotion
Identify significant morphological (passive) and gait (active) parameters for amphibious locomotion
Perform bipedal terrestrial and aquatic locomotion for comparison
Granular test track fitted with an Optitrack motion capturing system
High-speed video cameras were used to image aquatic locomotion
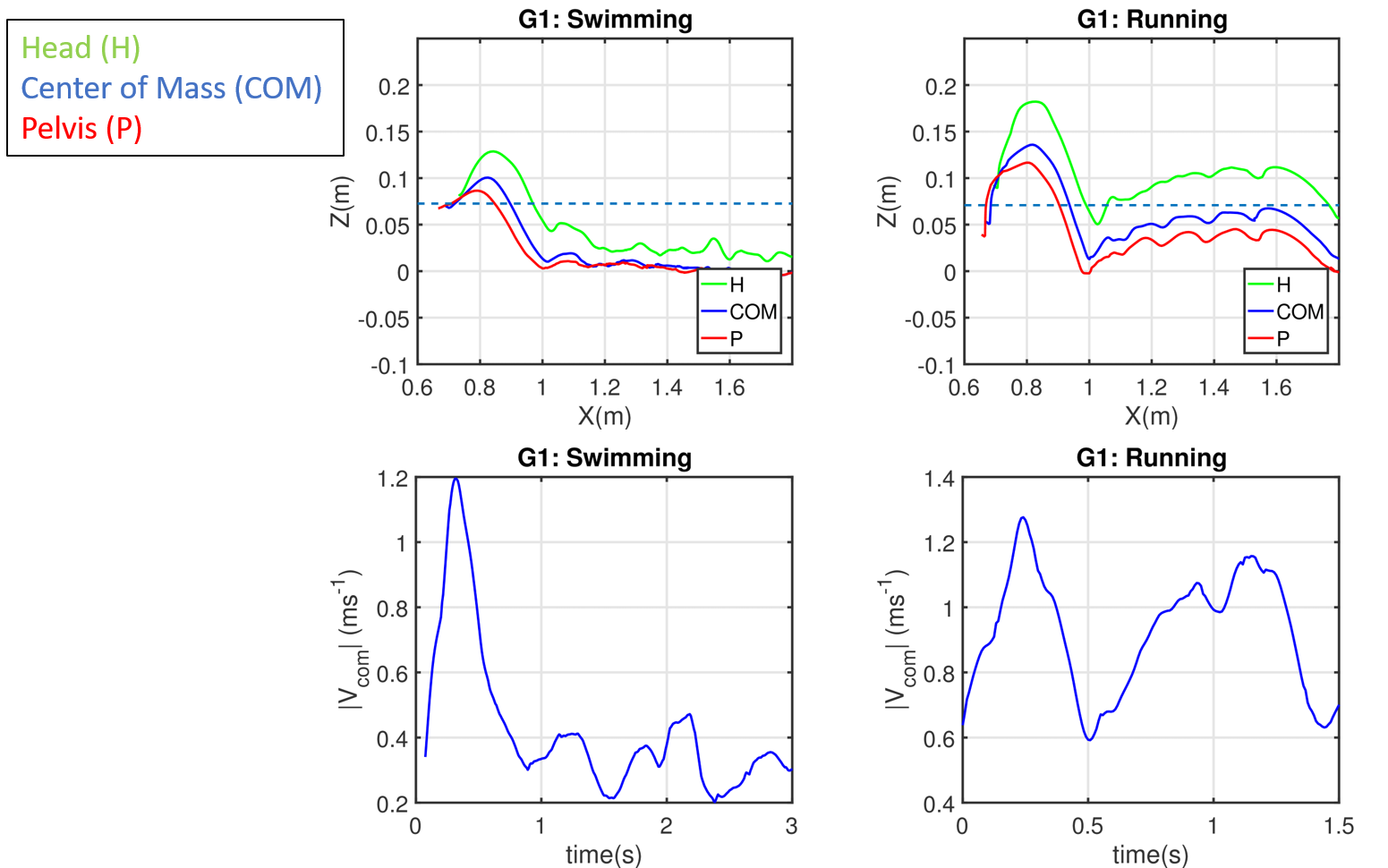
Optitrack motion tracking of a Green Basilisk exhibiting both swimming and running
Summary of exhibited transition methods
H. Bagheri, V. Jayanetti, H. Burch, H. Marvi, “Basilisk Lizards Transition Strategiesfrom Land to Water,” Society for Integrative and Comparative Biology, San Francisco, CA,January 2018.
H. Bagheri, V. Jayanetti, H. Burch, H. Marvi, “Basilisk Lizards Transition Strategiesfrom Land to Water,” Southwest Robotics Symposium, Tempe, AZ, January 2018.11
Experimental Platforms: Fluidized Bed & Transition Track
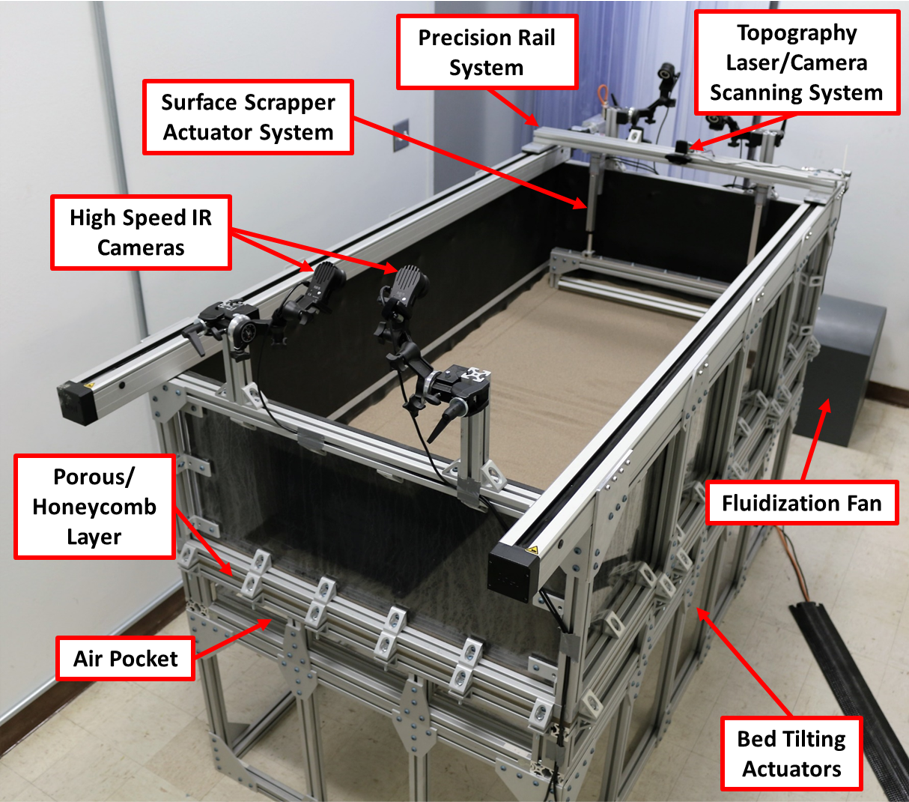
Fluidized bed is an experimental chamber that provides a controlled granular analog environment on which animal and robotic locomotion experiments can be performed. It can change the properties of sand such as cohesiveness and packing fraction through air-fluidization.
Transition track is an experimental chamber used to simulate a series of environments such as granular terrain, water, mud etc.
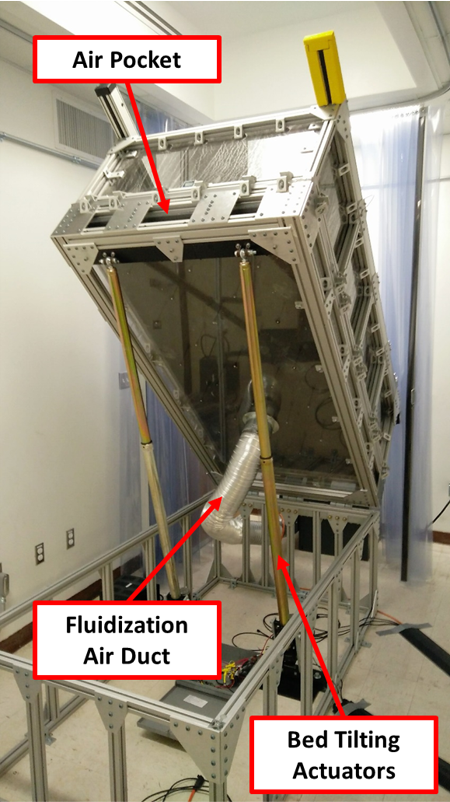
Air fluidized bed and its main components
Linear actuators used to vary tilt angle.
Transition Track full view
Optitrack motion capturing system is used to track animal and robot kinematics.